NPC Parameters시나리오 관리 -NPC Parameter 다양화를 통해 고객 맞춤형 'NPC 차량 주행 환경' 제공함.
Scenario Editor 사용성 개선시나리오 관리 -NPC 배치 효율화를 위해 '이전 배치 NPC 옵션 유지 기능' 추가함.
좌표 표시 기능 기타 시뮬레이터 기능 -Map에서 특정 지점의 위치 정보(x,y,z)를 표시하는 기능 추가함.
화면 저장 기능 기타 시뮬레이터 기능 -Simulator의 Main Camera의 현재 시점을 저장하는 기능 추가함.
Object 회전각 정보(LiDAR Sensor Capture) -AV(=Autonomous Vehicle)의 인지 성능 향상을 위해 LiDAR Sensor Capture 시 Object 회전각 정보 추가 제공함. -Instance 파일(.txt)에 Yaw 외 Roll, Pitch 추가하여 Object의 3차원 회전각 모두 제공함.
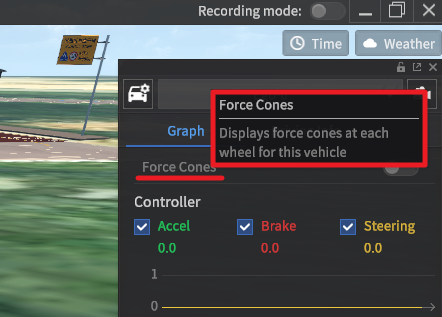
Tool Tip -기능 Tool에 마우스 Over 시, Title과 Description로 구성된 설명 팝업창 활성화되는 기능 추가함.
Force Cones
Obstacle Position 좌표 변환 -Obstacle 좌표계 ISO에서 ENU 좌표계로 수정함.
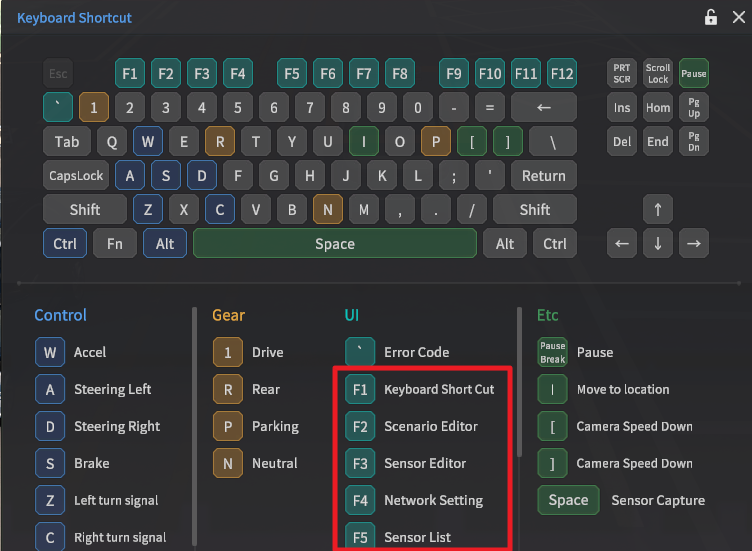
단축키를 통한 모드 진입 -기존에 사용하지 않던 F2, F3 등 단축키를 통해 모드 진입하는 기능 추가함. -F1 Key를 통해 Keyboard Shortcut 항목 확인 가능함.
Keyboard Shortcut
MORAI SIM Verison Name -기존 [Main] [날짜] [LastVersion] 방식은 길고 가독성이 떨어짐. (ex. v4.7.211109.H7 ) -정규 Release 발행이 앞으로 매 분기마다 이뤄지기에 Version Name 방식 변경함. -변경 후 [발행년도] [Release] [LastVersion]. (ex. 22.R1.0 )
Bug fixes
Scenario File 호환성 -Simulator 최신 버전에서 이전 버전의 Scenario File(.json) Load 시 호환 가능하도록 개선함.
Object Topic _ Pedestrian의 Velocity 정보 -ROS 통신 Object Topic에서 Pedestrian에 대한 Velocity 정보 출력하도록 개선함.
차량 기어 (P단) -일정 기울기 이상의 언덕길에서 차량이 P단에서도 뒤로 밀리는 이슈 개선함.
3D LiDAR -Sensor Capture 모드에서 Gaussian Noise 사용 시 3D LiDAR Intensity Type 모두 (Intensity, Semantic, Instance) 동일한 Distance을 갖게 개선함. -VLP32 모델 Sensor Capture 모드 값 출력 에러 개선함.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.